KUKA Robot Language(KRL)
WorkVisual
WorkVisual是KUKA機器人的程式端開發環境
- Workvisual 5.0啟動畫面

KRL教學
KRL程式分為.src與.dat兩個檔案,.src描述了程式的動作,.dat存放著.src中所需要用到的程式變數。可在WorkVisual中的Project Structure欄位新增.src與.dat檔案到專案內,或是透過匯入的方式將已寫好的檔案加入WorkVisual專案中
- 新增.src與.dat檔案
- WorkVisaul中一段自動生成的程式碼
在KRL中,程式碼會由數個DEF-END或是DEFFCT-ENDFCT的區塊構成
命名變數
在KRL中的命名受到以下規範
- 最長僅能24個字元
- 僅能使用26個英文字母(A-Z)、10個數字(0-9)與2個特殊字元「_」、「$」
- 命名時第一個字元不能使用數字
- 命名時不能使用關鍵字
宣告變數
在KRL中的宣告受到以下規範
- 在.src檔中宣告變數時,需要宣告在DEF與INI之間的區域,並在INI之後賦予初始值
- 在.dat檔中變數可以宣告為區域變數或是全域變數(GLOBAL),但須在DEFDAT檔名後方加上PUBLIC
語法
DECL Data_Type Variable_Name
範例:宣告變數
1.在.src檔中
DEF DefineValueExample
DECL INT Counter
INI
Counter = 5
END
2.在.dat檔中宣告區域變數
DEFDAT DefineValueExample
DECL INT Counter = 5
ENDDAT
3.在.dat檔中宣告全域變數
DEFDAT DefineValueExample PUBLIC
DECL GLOBAL INT Counter = 5
ENDDAT
資料型態
整數(Integer)
- 關鍵字:INT
- 定 義:不包含小數點之正負數
- 範 圍:-2147483648 ~ 2147483647
浮點數(Floating point number)
- 關鍵字:REAL
- 定 義:包含小數點之正負數
- 範 圍:±1.1E-38 ~ ±3.4E+38
布林(Boolean)
- 關鍵字:BOOL
- 定 義:邏輯狀態
- 範 圍:TRUE、FALSE
字元(Character)
- 關鍵字:CHAR
- 定 義:任一文字的字母
- 範 圍:ASCII編碼的字元編號
陣列(Array)
陣列是由多個相同型態的資料依序排列後所產生的資料型態
Array[]是指Array這一整個陣列,Array[n]則是指在Array中第n個元素
語法:宣告
DECL Data_Type Variable_Name[Number_of_Elements]
語法:給值
Variable_Name[Array_Index] = Value
範例
Measurement是一個有5個元素的浮點數陣列 第3個元素的值是7.23
DECL REAL Measurement[5]
Measurement[3] = 7.23
結構(Structures)
結構是由多個相同或不同的資料型態組合而成
語法
STRUC Structure name Data_Type1 A, B, Data_Type2 C, D
KUKA的點位資料即是一種結構的變數
STRUC E6POS REAL X, Y, Z, A, B, C, E1, E2, E3, E4, E5, E6, INT S, T
範例
DEF StrucExample
DECL E6POS Position
INI
Position = {X 0,Y 0,Z 0,A 0,B 0,C 0}
Position.X = 100
Position.Y = 200
Position.Z = 300
END
枚舉(Enumeration)
枚舉是一個物件的所有可能取值的集合
語法
ENUM Enumeration_Type_Name Constant_1, Constant_n
KUKA的操作模式正是一種枚舉的資料型態,僅會有T1、T2、AUT、EXT四種模式
ENUM MODE_OP T1, T2, AUT, EX, INVALID
範例
ENUM Week Sun,Mon,Tue,Wed,Thu,Fri,Sat
DECL Week Today
Today = #Thu
運算子
運算子是用來對值操作,根據不同的操作又分為不同類型的運算子
- 算數運算子
- 關係運算子
- 布林邏輯運算子
- 位元運算子
- 向量運算子
算數運算子
這類運算子用於值之間的計算
- 「+」:作為加法運算或表達正數的符號
- 「-」:作為減法運算或表達負數的符號
- 「*」:作為乘法運算的符號
- 「/」:作為除法運算的符號
關係運算子
這類運算子用於比較兩個(或以上)的值之間的關係
- 「==」:比較符號兩側的值是否相等
- 「<>」:比較符號兩側的值是否不相等
- 「>」:比較符號左側的值是否大於符號右側的值
- 「<」:比較符號左側的值是否小於符號右側的值
- 「=>」:比較符號左側的值是否大於或等於符號右側的值
- 「<=」:比較符號左側的值是否小於或等於符號右側的值
布林邏輯運算子
- 「NOT」:將布林值結果反轉
- 「AND」:比較符號兩側的布林值。其中一方為FALSE,輸出結果即為FALSE
- 「OR」:比較符號兩側的布林值。其中一方為TRUE,輸出結果即為TRUE
- 「EXOR」:比較符號兩側的布林值是否一致,一致為FALSE,不一致為TRUE
位元運算子
- 「B_NOT」:用於對二進制數字的每個位元進行「NOT」運算
- 「B_AND」:用於對符號兩側的二進制數字的每個位元進行「AND」運算
- 「B_OR」:用於對符號兩側的二進制數字的每個位元進行「OR」運算
- 「B_EXOR」:用於對符號兩側的二進制數字的每個位元進行「EXOR」運算
向量運算子
以「:」表示,意為在左邊的位置,移動右邊的距離
隨著兩邊使用的型態不同,會影響到最終結果的型態
結果參考下列表格
| 左邊型態 | 右邊型態 | 結果 |
|---|---|---|
| POS | POS | POS |
| POS | FRAME | FRAME |
| FRAME | FRAME | FRAME |
| FRAME | POS | POS |
優先度
| 優先度 | 運算子 |
|---|---|
| 1(HIGH) | NOT、B_NOT |
| 2 | *、/ |
| 3 | +、- |
| 4 | AND、B_AND |
| 5 | EXOR、B_EXOR |
| 6 | OR、B_OR |
| 7(Low) | ==、<>、<、>、<=、>= |
動作程式
機器手臂動作時,基於4個座標系統
| 座標系統 | 系統變數 | 狀態 |
|---|---|---|
| 世界座標 | $WORLD | 唯讀 |
| ROBOT座標 | $ROBROOT | 唯讀(可透過$MACHINE.dat內修改) |
| TOOL座標 | $TOOL | 可修改 |
| BASE座標 | $BASE | 可修改 |
出廠預設$BASE與$WORLD一致,在程式碼中透過可透過$TOOL、$BASE、$LOAD切換不同工具資料
$TOOL = TOOL_DATA[1]
$BASE = BASE_DATA[1]
$LOAD = LOAD_DATA[1]
※原廠手冊中有註明,切換$TOOL時應一併切換$LOAD的資料,否則若因此造成撞機,將無保固
PTP
Point-to-Point,此動作為手臂直接將各軸馬達角度轉動到點位上的角度
為三種動作中速度最快者,但此動作不保證TCP水平移動,若是手臂工具上是夾取液態的容器,容器內的液體可能會有灑出的狀況
語法
PTP 點位名字
PTP {點位資料}
PTP_REL {軸 角度} ;以當前位置做相對位置移動
範例
E6POS MY_POSITION
MY_POSITION = {X 250,Y 0,Z 200,A 0,B 0,C 0}
PTP MY_POSITION
PTP {A1 0,A2 -90,A3 90,A4 0,A5 0,A6 0}
PTP_REL {A1 90}
LIN
LINE此動作機器手臂會保持TCP維持一樣的傾角(?)走到目標點位
語法
LIN 點位名字 ;只能POS/E6POS的資料型態
LIN {點位資料} ;只能POS/E6POS的資料型態
LIN_REL {方向 數值} ;以當前位置做相對位置移動
範例
E6POS MY_POSITION
MY_POSITION = {X 250,Y 0,Z 200,A 0,B 0,C 0}
LIN MY_POSITION
LIN {X 250,Y 0,Z 200,A 0,B 0,C 0}
LIN_REL {X 90}
CIRC(不常用,經驗較少)
CIRCLE此動作需要一個參考點,機器手臂會經過參考點,走弧線到目標點位
語法
CIRC 參考點名字,目標點名字 ;只能POS/E6POS的資料型態
CIRC {參考點},{目標點} ;只能POS/E6POS的資料型態
CP動作
在LIN或CIRC動作指令中的點為後面,可以增加關鍵字,讓手臂不用真的到達該點位。通常用在閃躲現場機構等,不需要精確到位的點位,以節省手臂動作的時間
| 關鍵字 | 說明 | 單位 | 系統變數 |
|---|---|---|---|
| C_DIS | 與點位距離 | mm | $APO.CDIS |
| C_ORI | 等待補充 | ° | $APO.CORI |
| C_VEL | 等待補充 | % | $APO.CVEL |
語法
LIN 點位名字 C_DIS
LIN 點位資料 C_DIS
Status、Turn
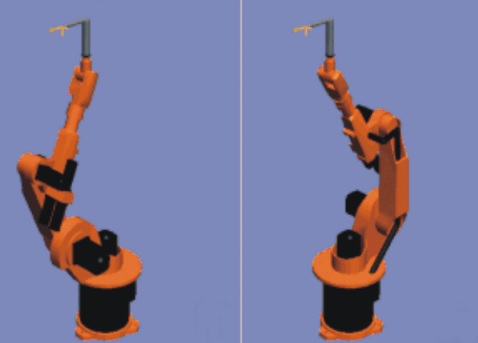
座標位置(X,Y,Z)不足以明確表達機器手臂的角度或姿態,S(Status)與T(Turn)便是為了更明確指出手臂的角度及姿態而誕生
S、T的數值紀錄在POS/E6POS兩種型態中,並且只有PTP的動作類型有效
- S與T介紹:相同的點位,卻無法得知各軸角度
Status
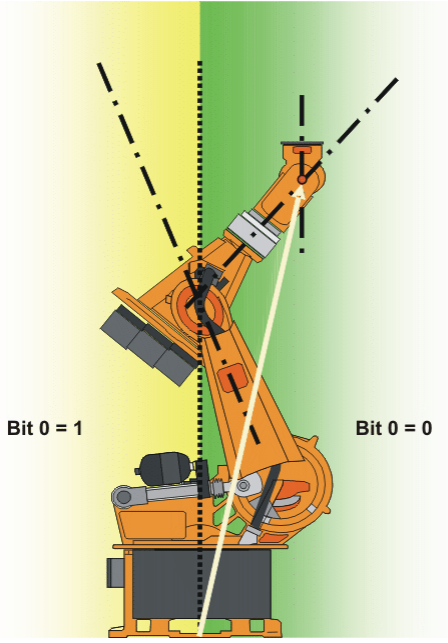
共有3個Bit組合成一個二進制數字,分別代表TCP的位置詳細資訊
- Bit 0:TCP是否經過中心線
示意圖:
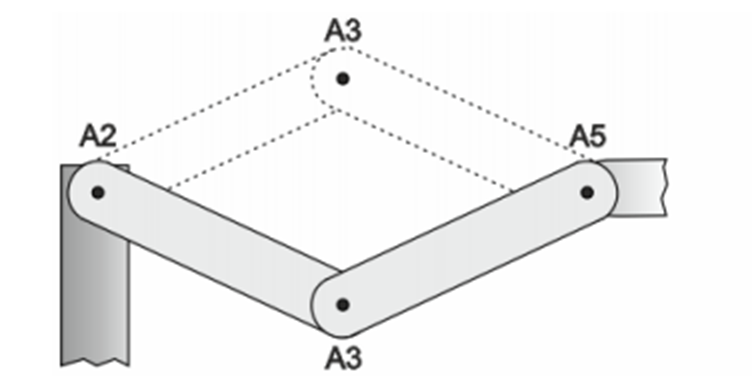
- Bit 1:A3角度是否大於0
示意圖:
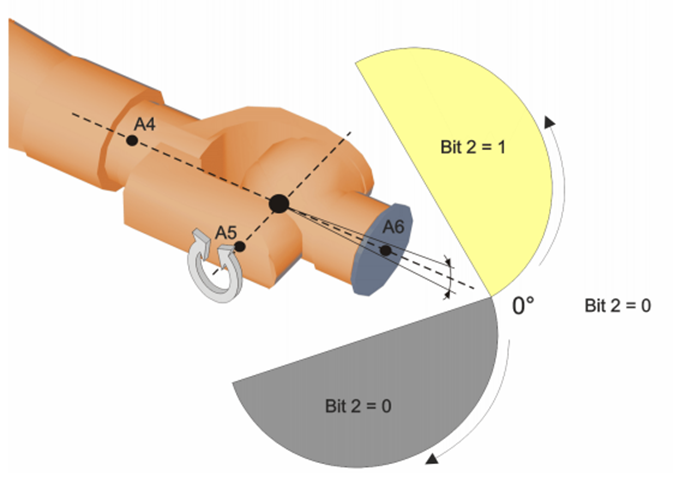
- Bit 2:A5角度是否大於0
示意圖:
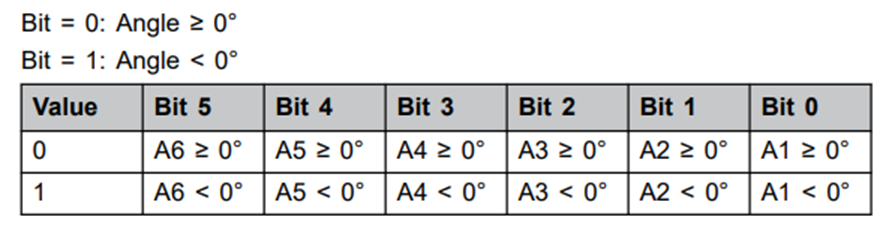
Turn
共有6個Bit組合成一個二進制數字,分別代表各軸馬達正轉或反轉
Turn與六軸角度的關係如下圖所示:
條件運算式
用來比較條件的結果,決定程式接下來應採取的行動
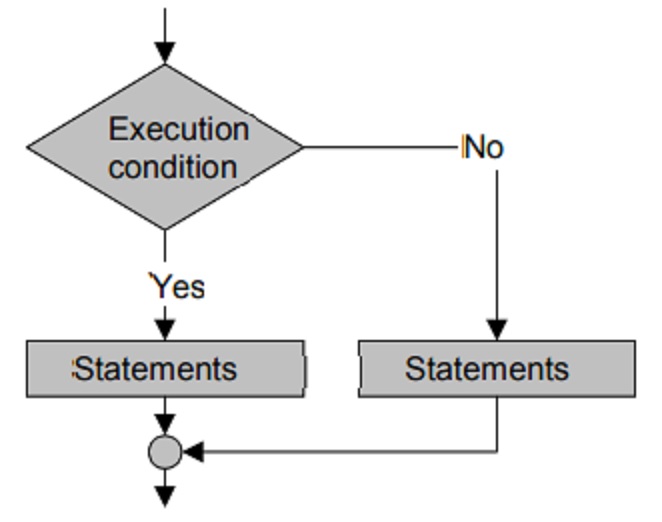
IF-ELSE
二選一的判斷。IF可單獨使用,不一定要有ELSE的區塊
條件為TRUE時執行,條件為FALSE則執行ELSE的區塊
- IF-ELSE流程圖
語法
BOOL IS_SUNNY
IS_SUNNY = TRUE
IF (IS_SUNNY) THEN
MsgNotify(Today is sunny day") ;IS_SUNNY是TRUE會執行這邊
ELSE
MsgNotify(Today is not sunny day")
ENDIF
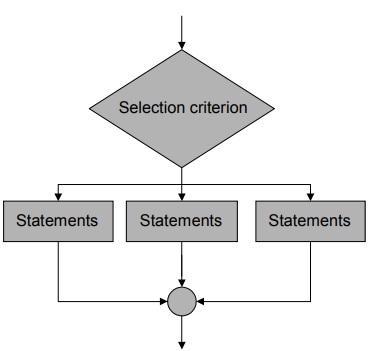
SWITCH-CASE
多選一的判斷。根據條件的數值,執行對應的結果
- SWITCH-CASE流程圖
語法
ENUM WEATHER_TYPE SUNNY,RAINY,CLOUDY
DECL WEATHER_TYPE TODAY_WEATHER
TODAY_WEATHER = #SUNNY
SWITCH TODAY_WEATHER
CASE #SUNNY
MsgNotify(Today is sunny day") ;TODAY_WEATHER是#SUNNY,所以會執行這裡
CASE #RAINY
MsgNotify(Today is rainy day")
CASE #CLOUDY
MsgNotify(Today is cloudy day")
DEFAULT
ENDSWITCH
迴圈
一樣的事情重複做
FOR
使用FOR迴圈需要宣告一個迴圈計數器
當迴圈計數器達到條件後,迴圈便會結束
語法
INT _I,_COUNTER ;迴圈計數器
_COUNTER = 0
;從1開始,每次執行後+1(STEP的數值),當_i達到100後離開迴圈
FOR _I = 1 TO 100 STEP 1
_COUNTER = _COUNTER + _I
ENDFOR
WHILE
使用WHILE迴圈時需要設定一個條件
先判斷條件,且結果是TRUE時才會執行迴圈內的動作
語法
INT _I,_COUNT
_I = 1
_COUNT = 1
WHILE _I <= 100
_COUNT = _COUNT * _I
_I = _I + 1
ENDWHILE
REPEAT
使用REPEAT迴圈時需要設定一個條件
先執行迴圈內的動作,再判斷條件,結果是TRUE時,不會再重複執行迴圈內的動作
※REPEAT與WHILE的差別,在於REPEAT至少會執行一次迴圈內的動作
語法
INT _I,_COUNT
_I = 1
_COUNT = 1
REPEAT
_COUNT = _COUNT * _I
_I = _I + 1
UNTIL _I > 100
LOOP
LOOP會一直執行回圈內的動作,不會主動停止
需要使用EXIT關鍵字離開LOOP迴圈
語法
INT _I,_COUNT
_I = 1
_COUNT = 1
LOOP
_COUNT = _COUNT * _I
_I = _I + 1
IF _I > 100 THEN
EXIT
ENDIF
ENDLOOP
流程控制
WAIT
等待某個條件或一段時間
語法(等待$IN[1])
DEF MyModule
INI
PTP HOME VEL= 100 % DEFAULT
;等待$IN[1]的值為TRUE
WAIT FOR $IN[1]
;等待$IN[1]的值為FALSE
WAIT FOR NOT $IN[1]
PTP HOME VEL= 100 % DEFAULT
END
語法(等待1秒)
DEF MyModule
INI
PTP HOME VEL= 100 % DEFAULT
WAIT SEC 1
PTP HOME VEL= 100 % DEFAULT
END
HALT
等待操作者按下SmartPAD的「開始鍵」後才繼續
語法
DEF MyModule
INI
PTP HOME VEL= 100 % DEFAULT
HALT
PTP HOME VEL= 100 % DEFAULT
END
字串處理
在KRL中處理字串不能像C#那樣直接轉換或比較,必須透過KUKA內建的方法來達成
String轉萬物
KRL中提供很多東西轉String的功能,其共通點都是StrTo要轉什麼東西
下列整理一些可能常用的清單
- StrToInt:字串轉整數
- StrToReal:字串轉小數
- StrToBool:字串轉布林
- StrToFrame:字串轉FRAME(XYZABC)
- StrToAxis:字串轉AXIS(A1~A6)
- StrToE6Axis:字串轉E6AXIS(A1~A6,E1~E6)
- StrToPos:字串轉POS(XYZABC)
- StrToE6Pos:字串轉E6POS(XYZABC,E1~E6)
方法
使用StrToXXX必須代入兩個參數:來源字串、輸出資料
該方法執行後會回傳BOOL資料,供使用者判斷是否有轉換成功
語法(以StrToBool舉例)
DECL BOOL _SUCCESS,_RESULT
_SUCCESS = StrToBool("TRUE",_RESULT)
上述語法中StrToBool執行轉換的結果(T/F)會存入)_SUCCESS中
因此可透過檢查_SUCCESS來得知是否有轉換成功
而字串轉換後的值會存入_RESULT
字串長度
KRL中字串由字元陣列組成,並在宣告時指定長度
定義長度
StrDeclLen方法可以回傳該字串定義時所指定的長度
語法
DECL CHAR _MESSAGE[20]
DECL INT _LENGTH
_LENGTH = StrDeclLen(_MESSAGE[])
經過StrDeclLen所計算的長度(20)會存入_LENGTH中
實際長度
有些字串在宣告時可能直接宣告為最長(256),因此取得該變數的宣告長度沒有意義
要取得字串的實際長度要用StrLen這個方法
語法
DECL INT _LENGTH
_LENGTH = StrLen("How long is this String")
經過StrLen所計算的長度(23)會存入_LENGTH中
尋找內容
透過StrFind方法可以查詢某字串是否包含另一指定的子字串,並回傳該子字串在字串中的第幾個位置
DECL CHAR _SOURCE[50]
DECL INT _RESULT_1,_RESULT_2,_RESULT_3,_RESULT_4,_RESULT_5
_SOURCE[] = "ABCDE"
_RESULT_1 = StrFind(1,_SOURCE[],"AC",#CASE_SENS)
_RESULT_2 = StrFind(1,_SOURCE[],"a",#NOT_CASE_SENS)
_RESULT_3 = StrFind(1,_SOURCE[],"BC",#CASE_SENS)
_RESULT_4 = StrFind(1,_SOURCE[],"bc",#CASE_SENS)
_RESULT_5 = StrFind(1,_SOURCE[],"bc",#NOT_CASE_SENS)
_RESULT_1的值是0,因為來源字串不包含”AC”
_RESULT_2的值是1,因為在不區分大小寫的情況下,”a”在來源字串的第1個位置
_RESULT_3的值是2,因為”BC”開頭的”B”在來源字串的第2個位置
_RESULT_4的值是0,因為在區分大小寫的情況下,”bc”不存在於來源字串中
_RESULT_5的值是2,因為在不區分大小寫的情況下,”bc”開頭的”b”在來源字串的第2個位置
比對內容
透過StrComp方法可以比對來源字串是否與某字串相符
DECL CHAR _SOURCE[50]
DECL BOOL _RESULT_1,_RESULT_2,_RESULT_3,_RESULT_4,_RESULT_5
_SOURCE[] = "ABCDE"
_RESULT_1 = StrComp(_SOURCE[],"ABCDE",#CASE_SENS)
_RESULT_2 = StrComp(_SOURCE[],"abcde",#CASE_SENS)
_RESULT_3 = StrComp(_SOURCE[],"abcde",#NOT_CASE_SENS)
_RESULT_4 = StrComp(_SOURCE[],"ABC",#CASE_SENS)
_RESULT_5 = StrComp(_SOURCE[],"abc",#NOT_CASE_SENS)
_RESULT_1的值是TRUE,來源字串的值是”ABCDE”
_RESULT_2的值是FALSE,在區分大小寫的情況下,來源字串的值不等於”abcde”
_RESULT_3的值是TRUE,在不區分大小寫的情況下,來源字串的值是”abcde”
_RESULT_4的值是FALSE,來源字串的值不等於”ABC”
_RESULT_5的值是FALSE,來源字串的值不等於”abc”