機器手臂基本介紹
- 機器手臂系統

①機器人本體
②控制器
③教導器(SmartPAD)
④連接線(動力線、訊號線等)
機器手臂教導器(SmartPAD)
- SmartPAD-2 正面
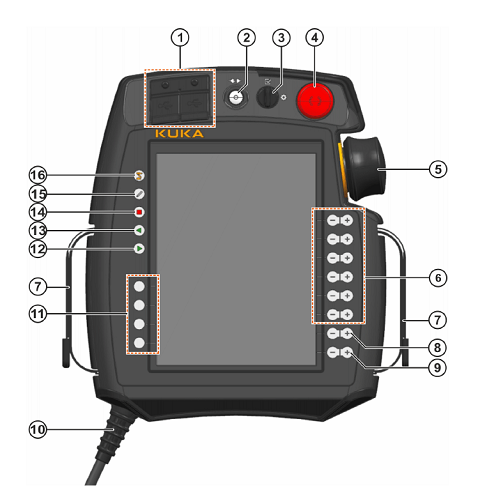
①USB:可將程式透過隨身碟上傳到控制器
②斷線按鈕:拔除教導器的按鈕
③模式旋鈕:切換模式(T1、T2、AUT、EXT)
④緊急停止按鈕
⑤6D滑鼠
⑥軸∕座標吋動按鈕:控制單軸移動
⑦手帶
⑧程式速度控制按鈕:手動程式∕自動模式的運轉速度+∕-
⑨手動速度控制按鈕:吋動模式的運轉速度+∕-
⑩連接線:連接至KR C4的訊號線
⑪自訂按鈕:供擴充套件使用
⑫開始鍵:開始執行程式
⑬倒退鍵:T1模式中移動回上一個位置
⑭暫停鍵:暫停執行中的程式
⑮鍵盤鍵:開啟∕關閉虛擬鍵盤
⑯主選單鍵:開啟∕關閉主選單
- SmartPAD-2 背面
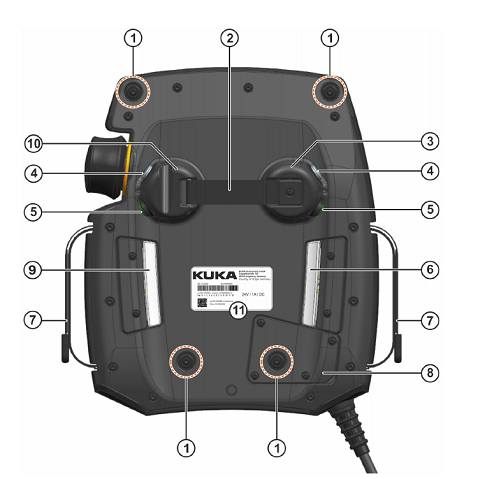
①背帶固定扣(選配)
②支撐帶
③左側拱頂(右手握)
④啟用開關(Engage):在T1∕T2模式下必須輕壓才能吋動手臂或執行程式,若是未壓下或是重壓則機器手臂會停止動作
⑤開始鍵:開始執行程式
⑥啟用開關
⑦手帶
⑧連接線蓋板
⑨啟用開關
⑩右側拱頂(左手握)
軸向
- A1~A6軸

- A1旋轉軸位置
- A2旋轉軸位置
- A3旋轉軸位置
- A4旋轉軸位置
- A5旋轉軸位置
- A6旋轉軸位置
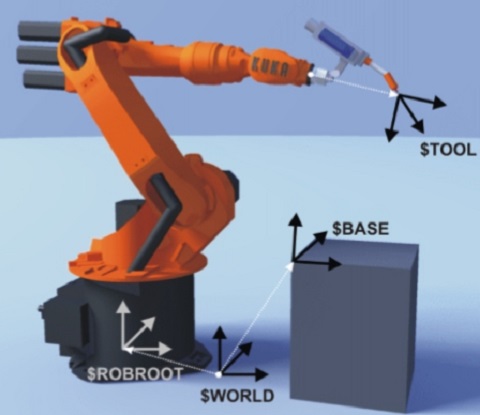
座標系
世界座標
以機器手臂底座中心為原點,X軸為前後、Y軸為左右、Z軸為上下
BASE座標
Base是可由使用者透過自訂X、Y軸方向與角度,定義新的平面
用以克服機器手臂在非水平的工作平面下作業的需求
Base座標是在世界座標中表示這個平面的原點位置
TOOL座標
工具中心點(Tool Center Point,通稱為TCP)
TCP預設為A6法蘭的中心點,可透過教導的方式將其修正到治具上任一點
Tool座標是在世界座標中表示這個TCP的位置
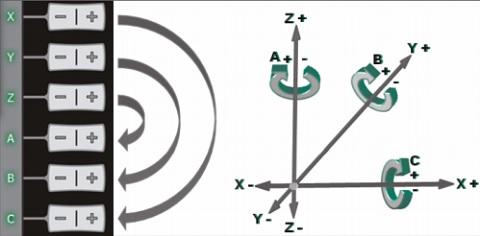
吋動方式
吋動有軸(Axis)、世界(World)、Base與Tool四種座標參考可以移動
軸座標是A1~A6的單軸移動,其餘三種皆是XYZ與ABC的操作方式
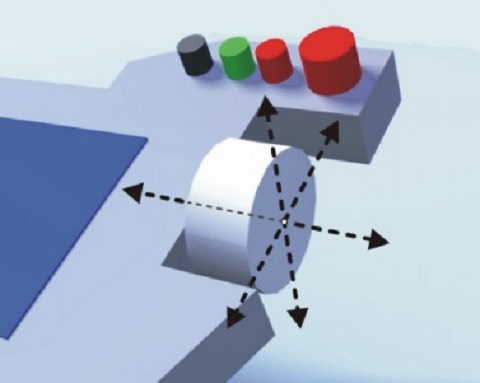
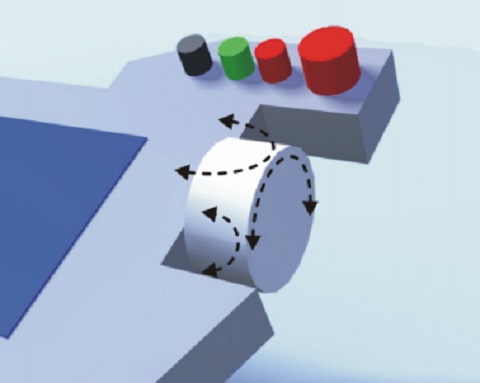
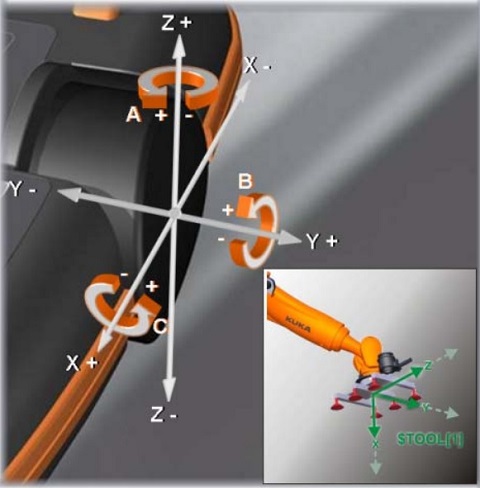
6D滑鼠使用方式
- 6D滑鼠方向
- 6D滑鼠旋轉
- 6D滑鼠與Tool的關係
教學影片